

Bu yarışmada kullanılan sistem RoboCup denilen yarışmadan esinlenen basit hareketlerle düzenlenmiştir. Her takım kendisine ait yazılım ve robot ile veya sadece yazılım ile USB kamera bağlantısı ile alınan video görüntüsünden temelde kendi robotu ve topun yerini ve yönünü, pratikte ise tüm robotlar, top ve kalenin yerini belirleyen bir algoritma kullanırlar. Takımlar kendi robotlarını COMPORT üzerinden yukarıda verilen ASCII karakterlerle topa doğru hareket ettirerek ve her veya birkaç video çerçevesinde bu işlemi tekrarlayan bir döngü çalıştırarak kontrol ederler.
Her deneme hakem tarafından verilen başla komutu ile başlar, bu nedenle takımlar yazılımda işlemi başlatacak bir sistem kurmalıdır. Hakem başla ve dur komutu verdiğinde robot takımdan görevlendirilen bir yarışmacı tarafından parkura konur veya parkurdan alınır.
Yarışma küçük boyutlu robotlar ile oyun sahasının üzerine yerleştirilen video kamera kullanılarak alınan görüntüyü işleyerek verilen 2 görevin yapılması üzerine kurgulanmıştır. Her takım tek göreve veya her iki göreve de ayrı ayrı kayıt olabilir. Her iki kategori de ayrı ayrı derecelendirilecek, ancak ödüller toplam puan üzerinden verilecektir. Her kategori derecelerine ayrıca sertifika verilecektir.
Birinci görev, parkurda penaltı atışı olup tek yarışmacı robot ve kaleci robot ile gerçeklenir. İkinci görev tam saha top sürme ve gol atma amaçlıdır. Tek yarışmacı robot 2 adet engel robotu geçerek topu kaleye ulaştıracaktır.
Her bir robot kablosuz olarak yönsel olarak verilen ASCII karakter komutları ile kontrol edilerek görevler en kısa zamanda ve en hatasız yapılarak tamamlanmaya çalışılacaktır.
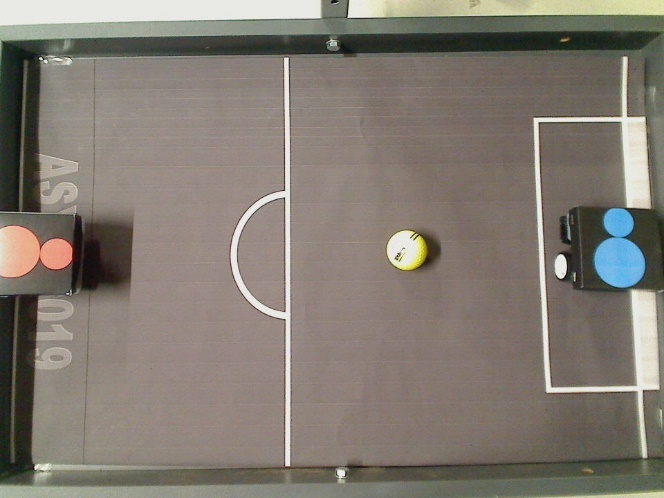
Parkur Boyutları: 1m x 1.5 m
Renkler: Koyu Gri zemin üzerinde gri çizgiler
Kamera: Orta çizgi üzerinde 1.5m yükseklikte
Kamera bağlantısı: USB
Komut iletimi: Kablosuz nRf24 bazlı
Top: Sarı 3cm çapta golf topu
Her takım kendi robot ve kablosuz sistemini hazırlayabilir. Robotu olmayan sadece yazılım ile katılabilecek takımlar için demo amaçlı mevcut robotlar da aşağıda verilen haberleşme protokolünü kullanarak yarışılabilir. Robotlara erişim antrenman saatlerinde mümkün olacaktır.
Görevler
Bütün görevlere katılmak zorunlu değildir. İsteyen katılımcılar istedikleri göreve veya bütün görevlere de kayıt olabilirler. Her kategori ayrı ayrı derecelendirilecek ve sertifikalandırılacaktır. İlan edilen ödüller ise 2 görevin toplam puanı üzerinden verilecektir.
Penaltı atışı
Bu görevde yarışmacılar kaleye doğru konan topa ceza sahası dışından gelerek vurarak
kaleye gol atmaya çalışacaklardır. Bu esnada platforma ait kaleci robot hareketli
olacaktır. Her takımın 3 atış hakkı vardır. Her atışta robotun topa tek bir dokunma
izni olacaktır. Topa vuramayıp onu ıskalayarak geçen robotun vuruşu yapılmış
sayılır. Değerlendirme her gol 20 Puan, kaleciye çarpan her top 10 puan, dışarıya
giden top 5 puan olarak hesaplanır. Topa vuramayan ve ıskalayan robot puan alamaz.
Oyun sırasında üzerinden parça düşen, dağılan robotlar o anki haklarını kullanmış
sayılarak servis almaları sağlanacaktır. Yarışma sonunda aynı puanı alan dereceye
girebilecek takımlar ikişer hak ile birbiri ile yeniden yarışır.
Top sürme
Bu görevde yarışmacı robot kendi kalesi penaltı noktasındaki topu istediği yerden
başlayarak sürecek, aradaki engel robotları geçerek kaleye yönlendirmeye
çalışacaktır. Burada her takımın 2 hakkı olacak ve zaman tutularak top gol çizgisini
geçtiği anda zaman durdurulacaktır. Bu yarışma en kısa sürede tamamlanmayı
hedeflemektedir. Engel robotlarına top dışında yarışmacı robotun dokunması +5 saniye
ile cezalandırılacaktır. 2 hakkın toplam süresi yarışmacının skorunu
belirleyecektir. her hakkı en kısa zamanda bitiren takım 20, ikinci takım 15 ve
üçüncü takım 10 ve 4 takım 5 puan alarak toplam puan hesaplanacaktır. 2 adet kırmızı
Engel robotlarının yeri kale önü ve orta saha çizgisidir. Oyun sırasında üzerinden
parça düşen, veya dağılan robotlar o anki haklarını kullanmış sayılarak servis
almaları sağlanacaktır. Yarışma sonunda aynı puanı alan dereceye girebilecek
takımlar tek hak ile birbiri ile yeniden yarışır.

Robotlar
Boyut: En fazla 8cm x 8 cm ve 8 cm yükseklik.
Tekerlek Sayısı: Sınırlama yok.
Topa Vurma düzeneği: Topa vurmak için motorlu bir donanım kullanılmayacak,
robotun önü, arkası veya köşesiyle vuruş yapılabilir.
Renk Kodları: Her robotun üzerinde yarışmacı takımın belirlediği renk kodları
bulunacaktır. Demo robotlar üzerinde tek renk iki değişik büyüklükte daire şekli
bulunmaktadır. Kırmızı, mavi, sarı, yeşil ve turuncu renkler mevcuttur.
Teknik İnceleme: Robotlar teknik inceleme sonrası yarışmaya kabul edilecekler,
yarışma kabulü alan robotlar üzerinde tasarımı değiştirecek donanımsal değişiklik
yapılamayacak ancak bozulan ekipmanlar aynıları ile değiştirilebilecektir.
Kaleci Robot: Yarışmada isteyen takımın kullanabileceği ve kaleci olarak görev
yapacak robotların özellikleri aşağıda verilmektedir. Bu robotlar nRF24 wireless
transceiver ile donatılmış, arduino nano mikro kontrolcü temelli robotlardır.
Üzerlerinde 2 adet N20 mikrometal motor ve 30mm çaplı tekerlek vardır. Motor sürücü
olarak TB6612FNG Çift Motor Sürücü Kartı bulunmaktadır. 850mA 7.4V lityum iyon pil ile
enerji sağlanmaktadır.Robotlar bağımsız sağ ve sol motorlar ile diferansiyel sürme
mantığı ile hareket sağlamaktadır. Bu sayede ileri geri gitmeleri ve sağa ve sola kendi
tekerlek eksenleri çevresinde dönmeleri mümkün olmaktadır.
Mevcut örnek Robotlar sabit PWM altında çalışmaktadırlar. Kablosuz olarak kontrol
devresinden gelen ASCII 11 kodu ileri, 10 komutu geri, 12 komutu dur, 13 komutu sağa
dönüş ve 14 komutu sola dönüş işlemi için kullanılır. Her komut 20 msn işlenir ve
sürekli hareketi önlemek için hemen arkasından robot dur komutunu otomatik olarak
işletir.
Kablosuz kontrol devresi: Bu ekipman nRF24 wireless transceiver ile donatılmış, arduino nano mikro kontrolcü temelli bir devredir. yazılımın olduğu bilgisaayara USB kablo üzerinden bağlanacaktır. COM port üzerinden gelen aşağıdaki ASCII komut karakterlerini yukarıda verilen robot kontrol komutlarına çevirmektedir. Yarışmacı robot ve kaleci ve engel robotların haberleşmesinin karışmaması için farklı preamble kodları kullanılmaktadır.
Robotların USB portundan bağlı bilgisayar tarafından kontrol edilmesi aşamasında kullanılacak ASCII karakterler, ileri için "8", geri için "2", durmak için "5", sol için "4" ve sağ için "6" karakterleridir.
Her takım robot ve kablosuz kontrol devresi ve kontrol komutlarında serbesttir. Ancak nRF24 haberleşme ekipmanı kullanan takımlar kullanmak zorunda oldukları preamble kodlarını teknik komiteye onaylatmak zorundadır.
Yarışma Takvimi
Başvuru: 01 Ekim 2019
Antrenman: 31 Ekim 2019 13:00-16:00
Son Ayarlar: 01 Kasım 2019 10:00-13:00
Yarışma: 01 Kasım 2019 13:30
ÖDÜLLER
Birinciye
Nvidia Jetson Nano Developer Kit.

İkinciye Rasbery Pi 4
Üçüncüye Rasbery Pi 3

Teknik Komite:
Doç.Dr. Ahmet Özkurt, DEU Elektrik ve Elektronik Müh.Böl., Düzenleme
Sorumlusu
Doç.Dr. Güleser Kalaycı Demir, DEU Elektrik ve Elektronik Müh.Böl.
Dr. Öğr. Üyesi Taner Akkan, DEU İzmir Meslek Yüksekokulu
Dr. Tolga Olcay, DEU İzmir Meslek Yüksekokulu
Kayıt için takım üyelerinin isim ve kurumlarını asyu2019@yasar.edu.tr adresine
gönderiniz.
|
|
|
|
|
|