

The system used in this competition is organized by simple movements inspired by the competition called RoboCup. Each team uses an algorithm that basically determines the position and direction of the robot and the ball and, in practice, all robots, the position of the ball and the castle, from the video image taken with its own software and robot or only with software and USB camera connection. The teams in the competition control their robots by moving them to the ball with the above ASCII characters via COMPORT and running a repetitive loop in each or several video frames.
Each trial starts with the start command given by the referee, so the teams must establish a system in the software to start the process. When the referee commands start and stop, the robot is placed on the track or taken from the track by a competitor assigned from the team.
The competition is fictionalized based on completing the two given tasks complete the tasks by processing the image taken using the video camera placed on the playing field using the small size robots. Each team can be registered to one task or both. Both categories will be graded separately, but prizes will be awarded on the basis of total points. Each category will be awarded a certificate.
The first task is a penalty shootout on the course, with one competitor robot and a goalkeeper robot. The second task is for full field dribbling and scoring. The competitor robot will pass the 2 obstacle robots and reach the goal post.
Each robot will be controlled wirelessly by directional ASCII character commands and the tasks will be completed in the shortest time and without any errors.
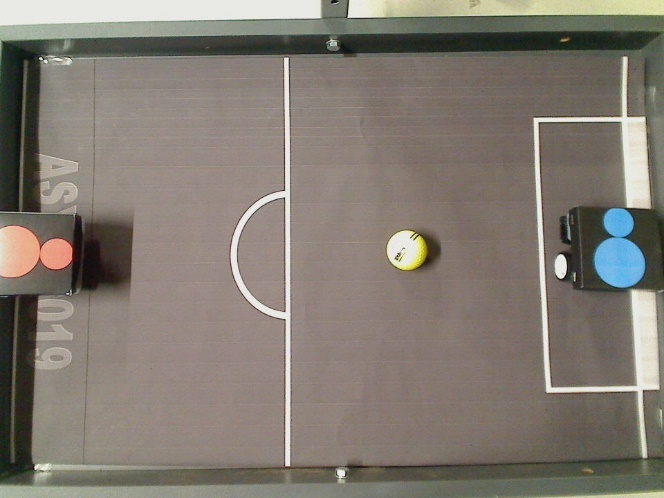
Course Dimensions: 1m x 1.5m
Colors: Gray lines on a dark gray background
Camera: 1.5m height above center line
Camera connection: USB
Command transmission: Wireless nRf24 based
Ball: Yellow 3cm diameter golf ball
Each team can prepare their own robot and wireless system. For teams that can only participate with software without a robot, existing robots for demonstration purposes can also compete using the communication protocol given below. Access to the robots will be possible during training hours.
Tasks
It is not mandatory to participate in all tasks. Participants can also register for the task they want. or all tasks. Each category will be graded and certified separately. The announced prizes will be awarded based on the total score of the 2 missions.
Penalty Shot
In this task, the contestants will come from outside the penalty area and try to
score goals by hitting the ball placed 30 cm away from the goal. During this time,
the goalkeeper robot belonging to the platform will be moving. Each team is entitled
to 3 shots. With each shot, the robot will have a single touch to the ball. The
robot who misses the ball, is considered to have been hit. Evaluation is calculated
as 20 points for each goal, 10 points for each ball hitting the goalkeeper, and 5
points for the ball going out. During the game, the robots with falling pieces or
scattered will be deemed to have used their current shooting rights and they will be
provided to receive service. At the end of the competition, the teams that can get
the same points compete again with each other with two rights.
Dribble
In this task, the contestant robot will start the ball at the penalty point of his
goal post starting from wherever he wants and try to direct the obstacle robots to
the goal post. Here, each team will have 2 rights and the time will be stopped as
soon as the ball crosses the goal line. This competition aims to be completed within
the shortest time . The total duration of the 2 rights will determine the
competitor's score. If the competitor robot touches obstacle robots other than the
ball, the competitor is punished with 5 seconds. The position of 3 red obstacle
robots will be determined during the competition. During the game, the robots with
falling pieces or scattered will be deemed to have used their current rights as 60
seconds and they will be provided to receive service. At the end of the competition,
the teams that can get the same points compete again with each other with one
right.

Robots
Size: Up to 8 cm x 8 cm x 8 cm height.
Number of Wheels: There is no limit.
Ball Hitting Mechanism: No motorized equipment will be used to hit the ball, but
the robot may be hit with the front, back or corner of the robot.
Color Codes: Each robot shall have the color codes specified by the competing
team. On demo robots, there are two different size circle shapes in one color. Red,
blue, yellow, green and orange colors are available.
Technical Examination: Robots accepted to the competition after the technical
examination will not be able to make any hardware changes that will change the design.
However, deteriorated equipment can be replaced with the same.
Goalkeeper Robot: Features of the robots that can be used by the team and will
serve as goalkeeper are given below. These robots are equipped with an arduino nano
microcontroller based nRF24 wireless transceiver. There are 2 N20 micrometal motors and
30mm diameter wheels on them. TB6612FNG Dual Motor Driver Board is available as motor
drive. The 850mA 7.4V lithium-ion battery provides energy. The robots are driven by
independent right and left motors and differential drive logic. This enables them to
move back and forth and turn right and left around their respective wheel axes.
Existing sample robots are working under constant PWM. Coming from the control circuit
wirelessly, code 11 in ASCII is used for forward, command 10 for reverse, command 12 for
stop, command 13 for right turn and command 14 for left turn. Each command is processed
for 100ms and the robot automatically executes the stop command immediately after it to
prevent continuous movement.
Wireless Control Circuit: This equipment is an arduino nano microcontroller based circuit equipped with nRF24 wireless transceiver. The circuit will be connected to the computer with the software via USB cable. The circuit converts the following ASCII command characters from COMPORT to the robot control commands given above. Different preamble codes are used to prevent communication between competing robots and goalkeeper and obstacle robots.
ASCII characters that will be used to control the robots from the computer connected to the USB port are "8" for forward, "2" for backward, "5" for stop, "4" for left and 6 for right.
Each tool is free in robot and wireless control circuit and control commands. However, teams using nRF24 communication equipment must have the technical committee approve the preamble codes they have to use.
Competition Calendar
Application: October 01, 2019
Training: October 31, 2019 13:00 - 16:00
Last Settings: November, 01 2019 10:00 - 13:00
Competition: November, 01 2019 13:30
AWARDS
As the first award
Nvidia Jetson Nano Developer Kit.

As the second, Rasbery Pi 4
As the third award, Rasbery Pi 3

Technical Committee:
Assoc. Prof. Dr. Ahmet Özkurt, DEU Department of Electrical and Electronics
Engineering, Regulatory Officer
Assoc. Prof. Dr. Güleser Kalaycı Demir, DEU Department of Electrical and
Electronics Engineering
Asst. Prof. Taner Akkan, DEU İzmir Vocational School
Dr. Tolga Olcay, DEU İzmir Vocational School
For registration please send the names and institutions of the team members
to asyu2019@yasar.edu.tr .
|
|
|
|
|
|